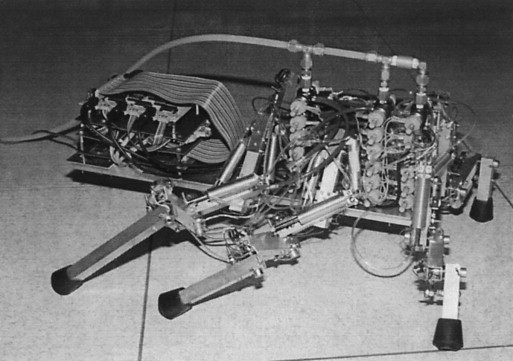
All of this information that we know about insects and their anatomy and locomotion can be incorporated into engineering designs of more successfully agile robots. Two recent results of this matrimony were a robot that was built based on the stick insect by Pfieffer et al in 1994 with the help of Holk Cruse, and a pneumatic robot that was based on the cockroach, described by Delcomyn and Nelson. Before these, two hexapod robots were developed at Cape Western Reserve University, one of which could walk on uneven terrain with a set of stick insect gait coordination mechanisms and local leg reflexes (Ritzmann et al 2000). Furthermore, inspiration was taken from one of the types of leg modifications (the salatorial legs utilized in grasshoppers) to reduce power consumption during walking. The very idea of jumping rather than walking to reduce the amount of power required to get from A to B was taken from grasshoppers, then the structure of the leg itself was also used (Ritzmann et al 2000). After this, more studies were conducted on insect locomotion and with better technology to watch videos in ultra-slow motion, more ‘tips’ were taken from insects for use in robotics. To solve the problem of climbing over top of a barrier or elevated terrain, slow motion footage was used to discover that when the joint of the middle leg flexes, the tibia rotates, allowing the femoral remotor muscle in the trochanter to actively generate the same movement (Watson et al 1998), ultimately resulting in the animal rearing up and over the barrier. This mechanism was also taken for use in robotics. In order to gain information about where to locate the sensors for the robot legs, once again the insect leg was inspected. It was found that sensilla of the leg are concentrated on the trochanteral segment of the insect leg (Ritzmann et al 2000), and therefore they were placed in the matching location on the robot. The resulting robot could perform all the same locomotory tasks as a cockroach, including rapid forward acceleration regards of the powerful rear legs, rotate its tibia to climb over objects, and use its front legs to search for objects (Ritzmann et al 2000).
However, engineers are far away from producing a robot that can walk as efficiently as insects do. The knowledge of insect locomotion, although vast, is not yet complete. Vigilant collaboration between biologists/entomologists and engineers may continue to further the knowledge and advancements on insect-inspired robotics in the future. This relationship may not only serve to create better, more efficient robots, but may prove to teach biologists more about insects as well or create a platform by which scientists can conduct experiments to further gain knowledge about insects. A successful walking robot has great potential for use as research tools or as a product designed for use in dangerous situations and places inaccessible to humans (Delcomyn & Nelson 2000). The opportunities are endless, all thanks to insects.
